镭神智能创新升级车载激光雷达灰尘过滤算法,为智能驾驶安全护航
激光雷达在不同应用场景,诉求其实也各不相同。尤其在汽车行业,通过使用安装在车辆上的激光雷达来全面了解周围环境,更看重激光雷达的环境适应能力。

矿区灰尘

雨天行驶(图源网络)
汽车在面临灰尘、雨雾天的情况下,均无法稳定可靠的工作,比如在多尘道路上或者矿区内行驶时扬起的灰尘,或是在雨雾天时,都容易造成激光雷达检测能力下降或者输出汽车、机器人不需要的干扰点云,这个时候对激光雷达的可靠性又多了一份考验。

镭神智能针对汽车、机器人等在行驶和运营环境中遇到的灰尘及雨雾问题,将扬尘及雨雾特性与点云算法进行大量的对比实验计算,形成一套激光雷达灰尘、雨雾过滤的算法。结合实际应用场景需求,不断进行多次的优化与提升,算法与数据学习突破盲点,解决无法识别灰尘过滤后的后方目标和感知精度问题,提升运行效率、稳定数据和安全性,最终取得突破性成果。

此套算法可应用于镭神智能任意一款激光雷达上,目前已在车规级混合固态激光雷达CH128X1和多线机械式激光雷达C16/32上完成测试及应用,使其具备灰尘、雨雾识别过滤的特点。
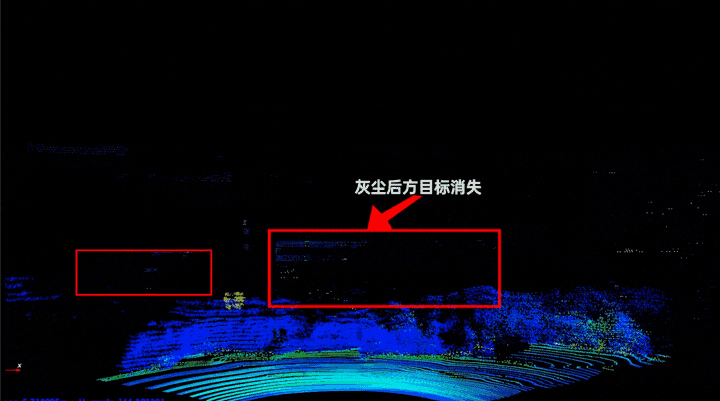
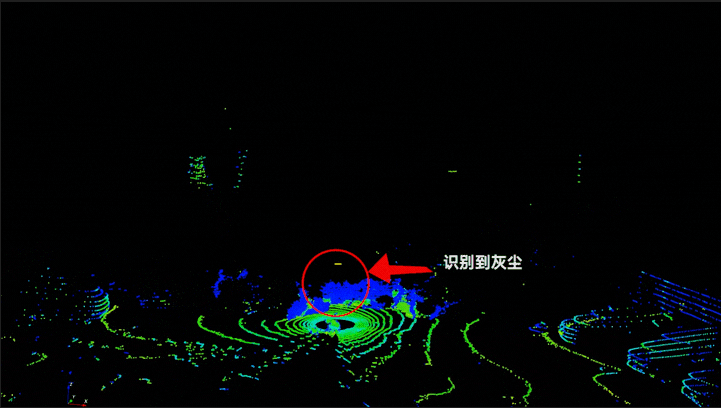
图1 CH128X1灰尘过滤功能优化前
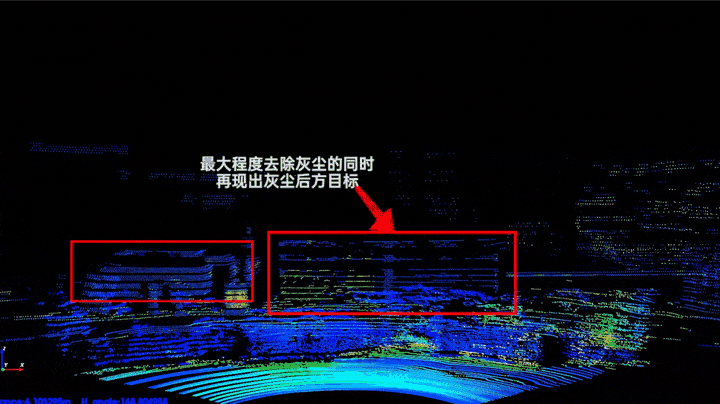
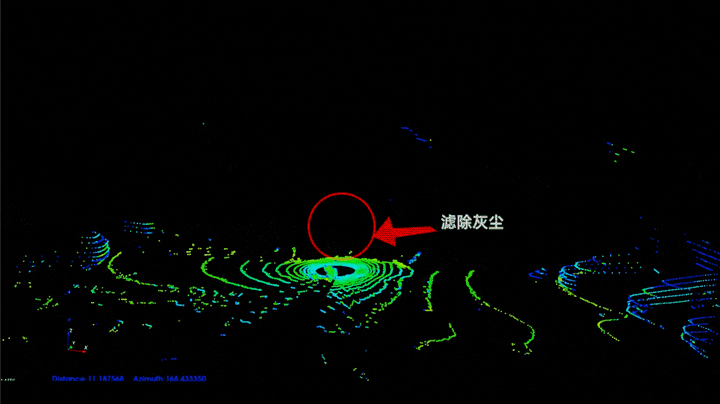
图2 CH128X1灰尘过滤功能优化后
从图1-2中可以看到车规级混合固态激光雷达CH128X1周遭或前方已经有很多灰尘,但就激光雷达CH128X1实际点云数据显示来看,在灰尘点云大幅度减少的同时,还能穿透浓厚灰尘,检测到后方的目标。
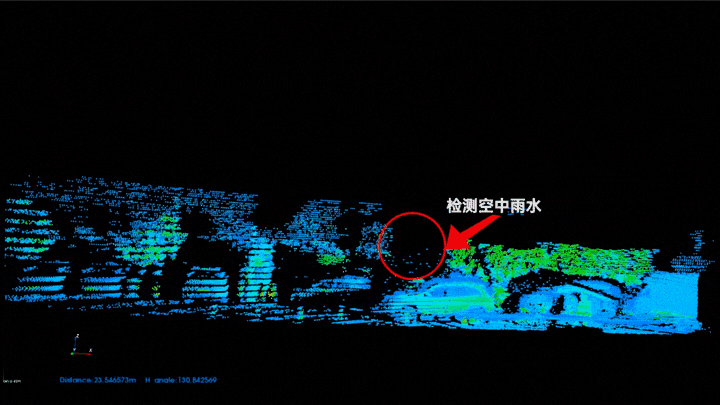
图3雨水过滤功能优化前
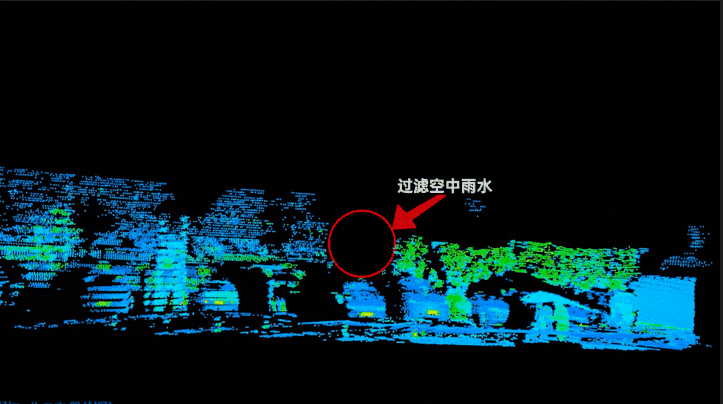
图4雨水过滤功能优化后
图3-4在下雨时,密集雨水的散点,会被当作障碍物,阻碍车辆或机器人的运动路线,在雷达去除雨水散点,可减轻上位机的数据处理负担。由此可见,CH128X1感知更精准,灵敏度更高。

镭神智能多线机械式激光雷达C16/C32进行4.0改革升级,探测精度更高、探测点云更稳定、抗光干扰能力更强。另外,对灰尘、雨雾进行反复测试,具备灰尘识别过滤的效果,感知性能再上新台阶。
C16/C32 灰尘过滤功能优化前
C16/C32 灰尘过滤功能优化后
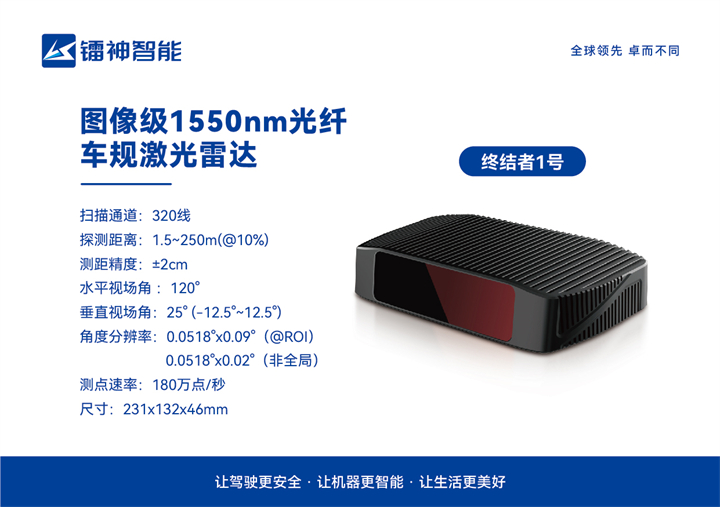
此外,本套算法还可应用在终结者系列1550nm光纤车规激光雷达及CX系列905nm车规混合固态激光雷达,保障智能汽车在雨雾、多尘等恶劣环境下也能安全行驶,践行“让驾驶更安全”的企业使命。


镭神智能作为一家全球领先的全场景激光雷达及整体解决方案提供商,秉承“让驾驶更安全、让机器更智能、让生活更美好”的企业使命,助力智能驾驶汽车更安全可靠。
- ·“青出于蓝”含金量还在上升 魏牌全新蓝山第46周销量1367辆!
- ·全场景NOA全国开城 长城汽车携全新蓝山闪耀广州车展
- ·开启智驾新时代!魏牌全新蓝山官宣全场景NOA全国开城
- ·华夏之光 耀世而来!比亚迪中大型旗舰MPV夏内饰科技全球首发
- ·华为乾崑智驾加持,方程豹豹8正式上市,开启智能越野新时代
- ·魏牌全新蓝山持续火爆热销!2024第45周销量1219台
- ·国货旗舰来了!比亚迪华为联合发布方程豹 豹8上市,售价37.98万元起
- ·纯视觉or融合感知?魏牌全新蓝山用“行云流水”智驾给出答案
- ·智驾再升级:腾势Z9GT首次OTA引领都市驾行新体验
- ·市场热销再创新高,魏牌全新蓝山问鼎30万级大六座SUV周销量冠军




















| 更多>>经销商推荐
- 经销商名称销售热线促销信息
- 成都福迪有限公司13488947872成都福迪汽车100万钜惠 献礼成都国际车展
- 比亚迪上典南门金牌4S店028-85023023火热7月火爆S7 超级优惠尽在上典
- 上汽MG四川新元素旗舰店400-830-7181
- 成都凯迪汽车销售服务有限公司028-85020666
- 成都集大成汽车销售服务有限公司028-85181100进店即送百元抵扣券 购408钜惠2.5万元
- 成都通安汽车有限公司028-85199912
- 广汽丰田成都三和新元素店028-85185511
- 成都集大成汽车销售服务有限公司13281151371到店即送百元代金劵标致308直降2.8万